
Emotitactor
Exploring How Designers Approach Emotional Robotic Touch
ABSTRACT
In this work, we bring designers into the exploration of emotional robotic touch, discuss their design decisions and reflect on their insights. Prior psychology findings show humans can communicate distinct emotions solely through touch. We hypothesize that similar effects might also be applicable to robotic touch. To enable designers to easily generate and modify various types of affective touch for conveying emotions (e.g., anger, happiness, etc.), we developed a platform consisting of a robotic tactor interface and a software design tool. When conducting an elicitation study with eleven interaction designers, we discovered common patterns in their generated tactile sensations for each emotion. We also illustrate the strategies, metaphors, and reactions that the designers deployed in the design process. Our findings uncover that the “otherness” of robotic touch broadens the design possibilities of emotional communication beyond mimicking interpersonal touch.
Design Questions
Can we develop a robotic touch platform that enables designers to program emotional haptic cues easily?
What decisions, strategies, and behaviors do designers employ when designing emotional robotic touch?
DESIGN JOURNEY OF EMOTITACTOR
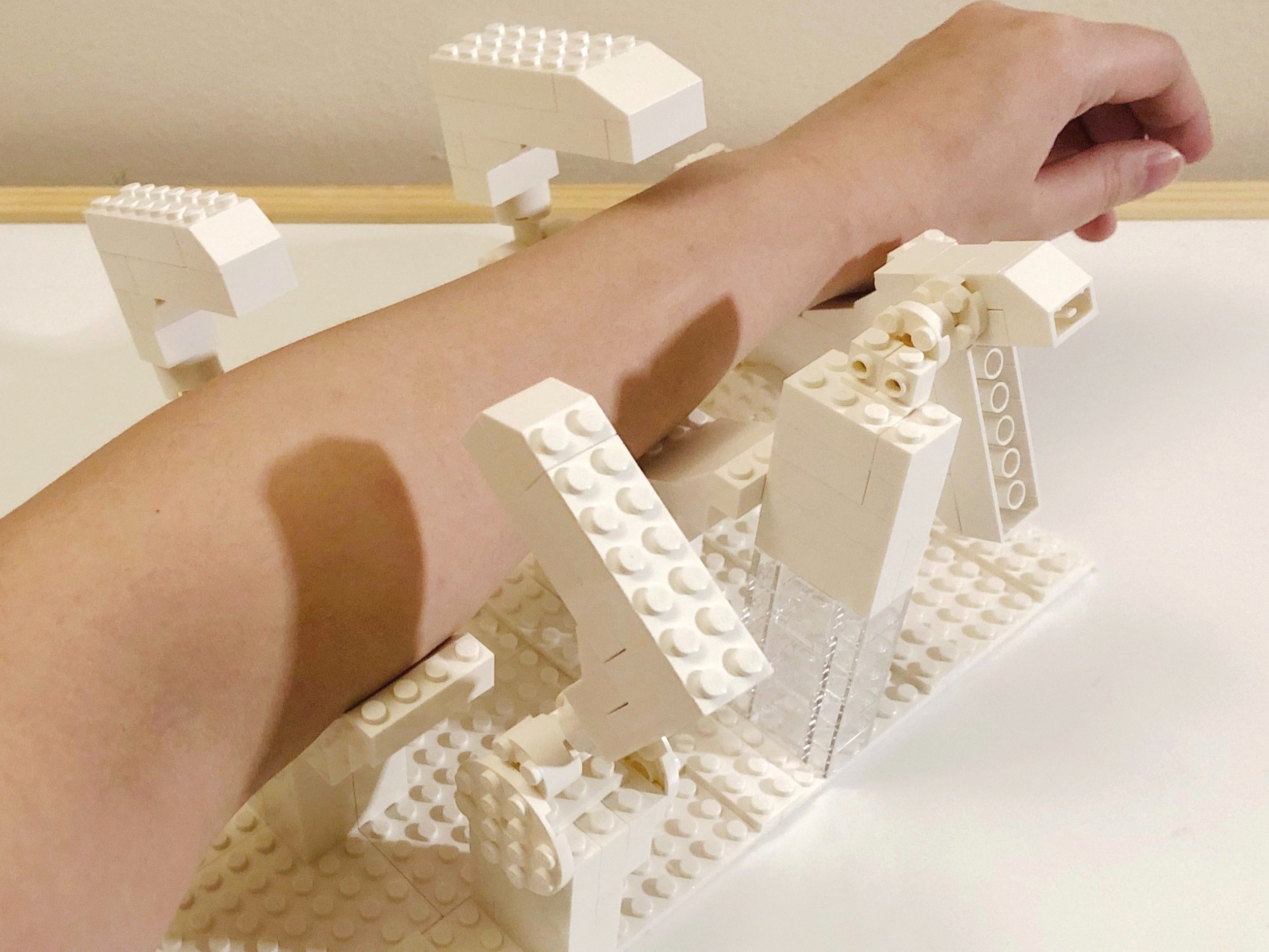
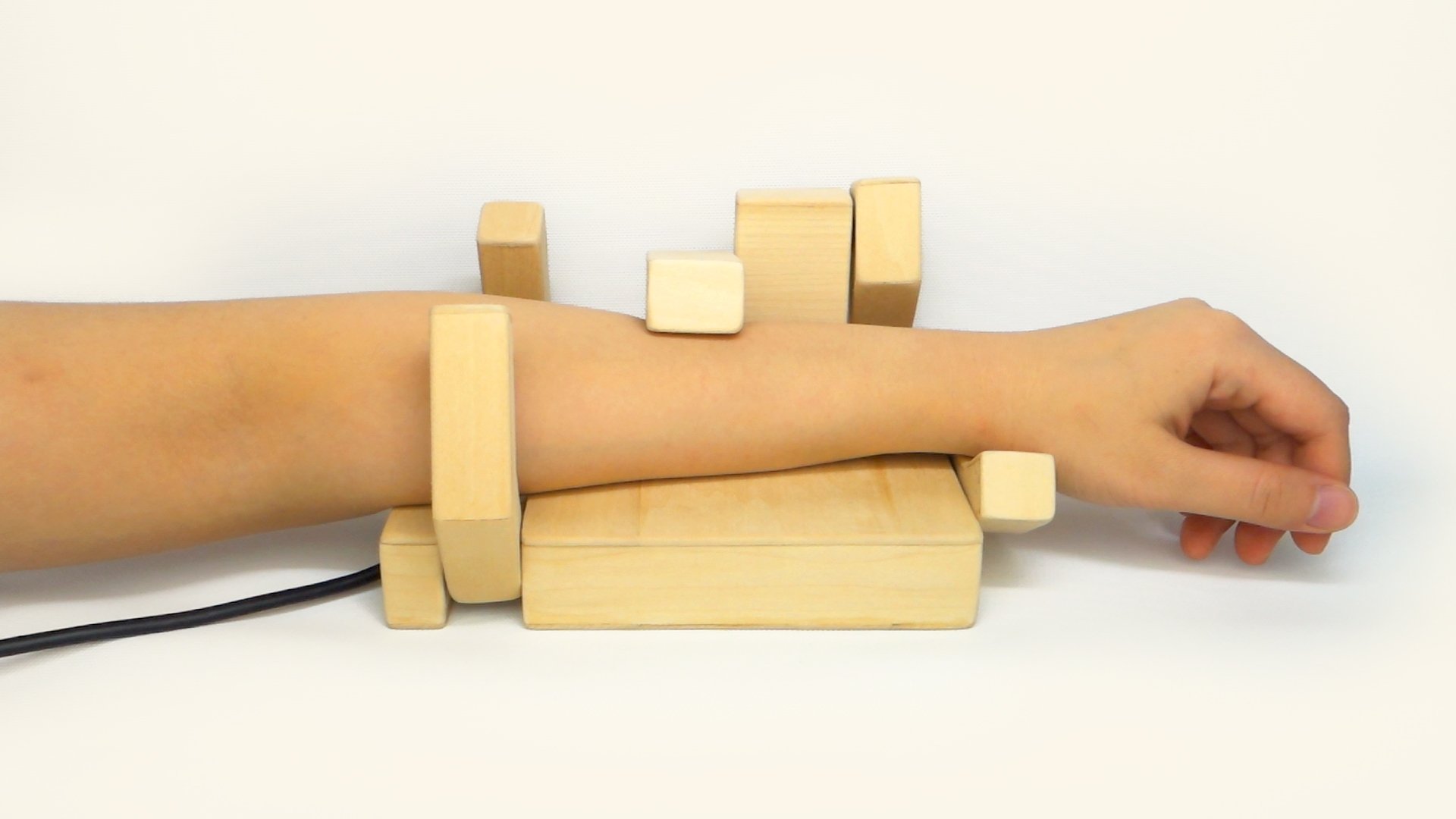
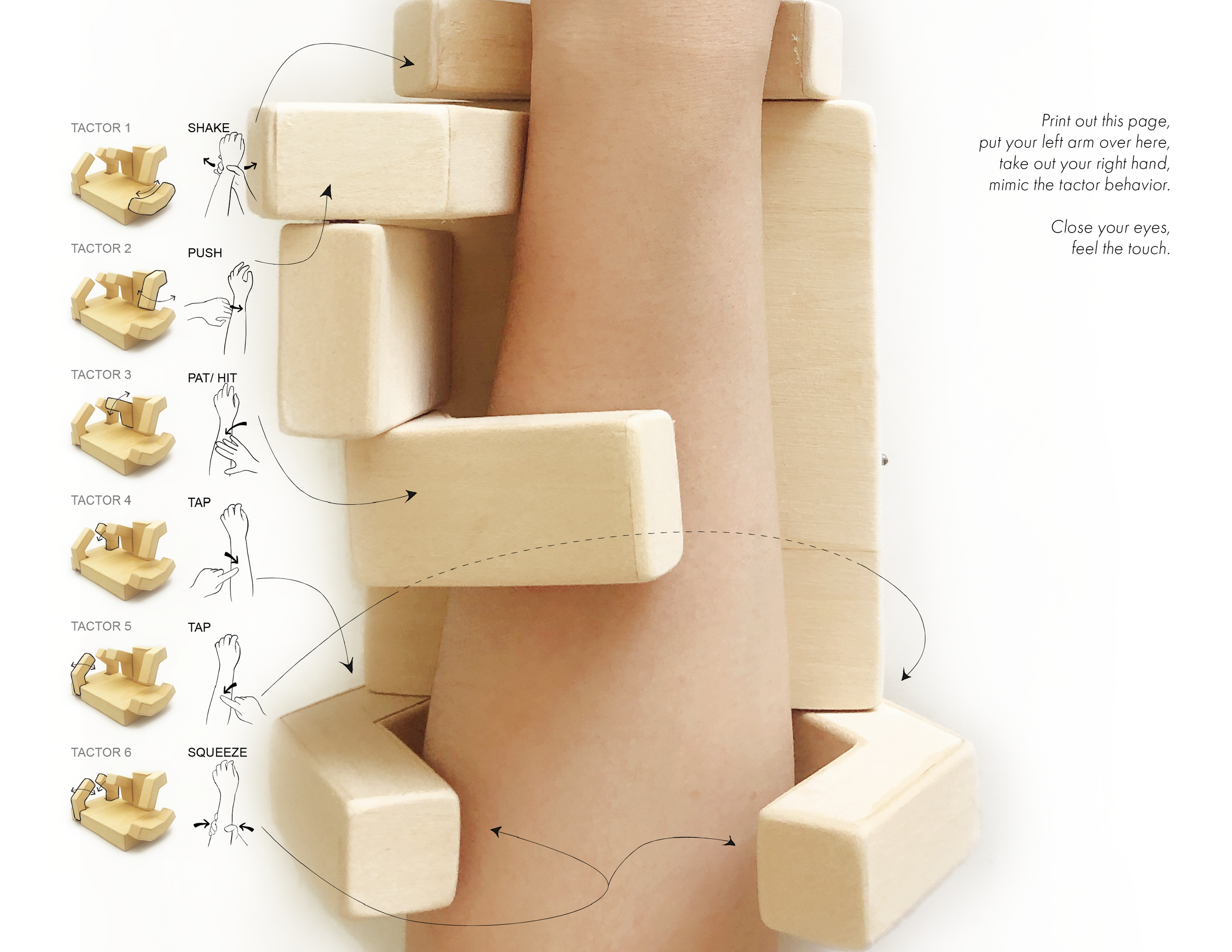
Starting with servo-driven tactors to recreate affective gestures on the forearm, we built a robotic tactor device through several iterations. Refer to EmotiTactor: Emotional Expression of Robotic Physical Contact for more details.
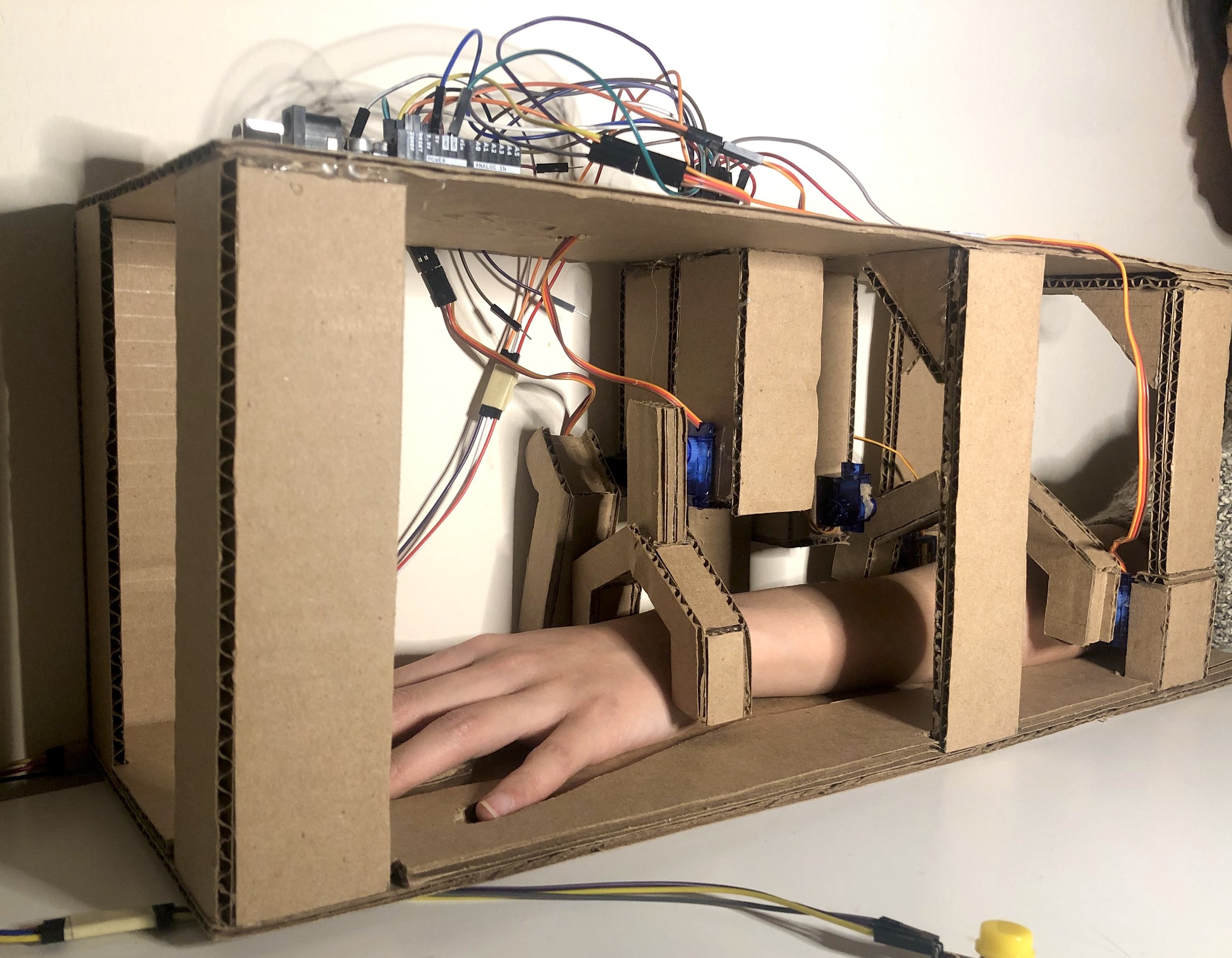
EmotiTactor Interface
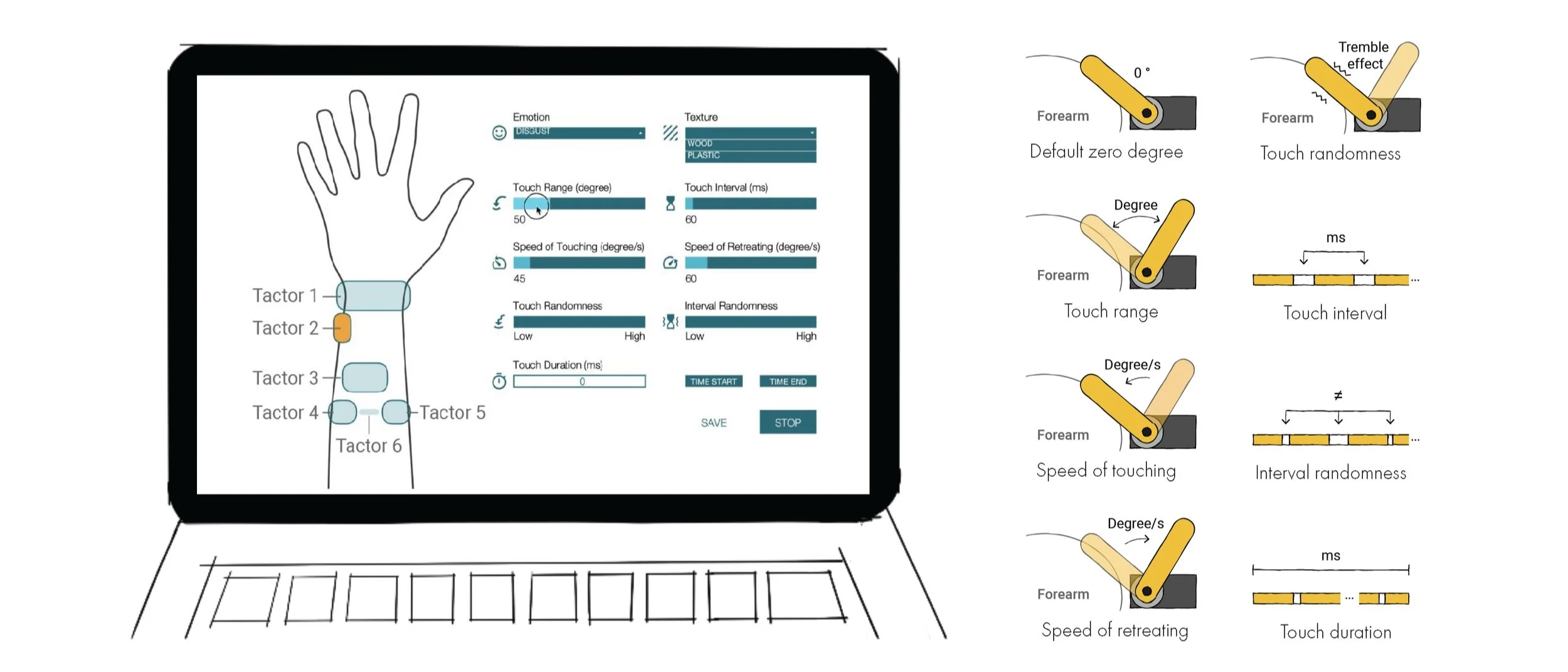
SOFTWARE-BASED DESIGN TOOL
To let designers easily generate the touch stimulation with our robotic interface, we developed a graphical user interface (GUI) to control and modify the tactor behaviors. It runs locally using Processing, and the data is transmitted to Arduino Nano through a USB. Designers can press the green color patterns on the arm-shaped diagram to trigger different tactors. To specifically control the tactor movement for creating emotional tactile cues, we have also defined a set of variables. As designers modify these variables with the sliders, the touch behavior of the robotic tactor changes simultaneously.
TEXTURE
To explore how textures may affect the perception of touch, we made three alternative skins [K] in addition to basswood with different materials that were commonly used in making affective robots.




ELICITATION STUDY
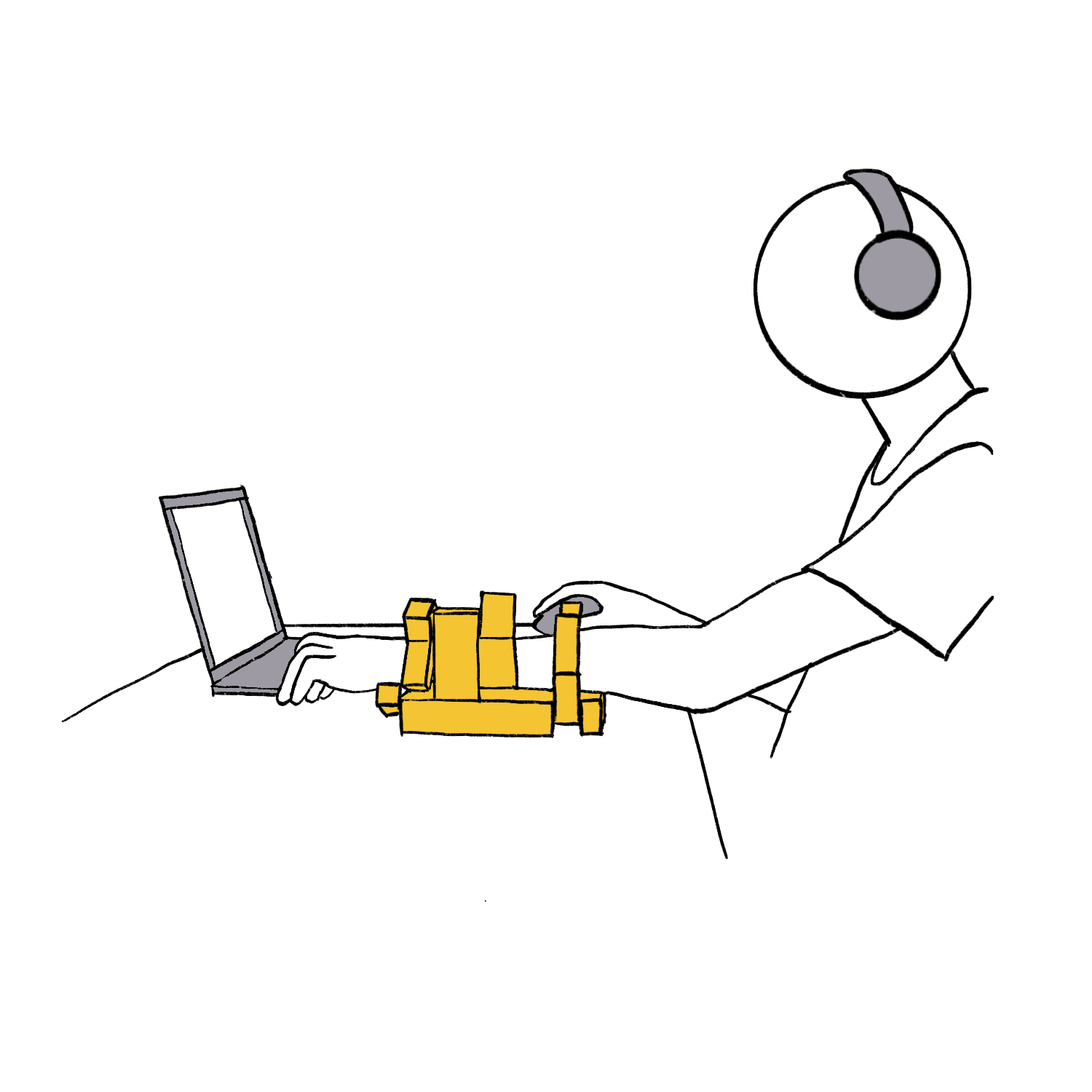
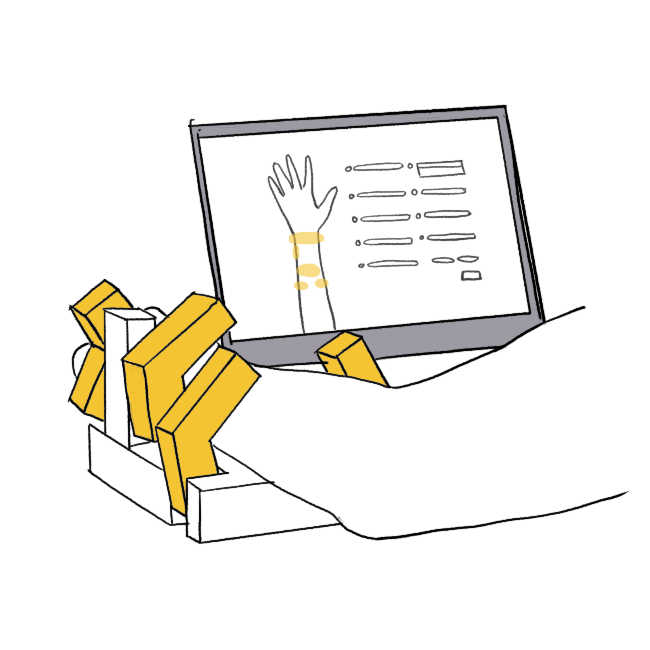
To investigate how designers would explore emotive robotic touch, we conducted an elicitation study. A group of designers was invited and asked to program robotic touch sensations that enable the robot to express emotions to a person. They tested these tactile cues on their own forearm. We asked them to rate the confidence levels of the touches they generated. We then analyze and present the quantitative data of the touch patterns and illustrate the qualitative results of their design experiences.
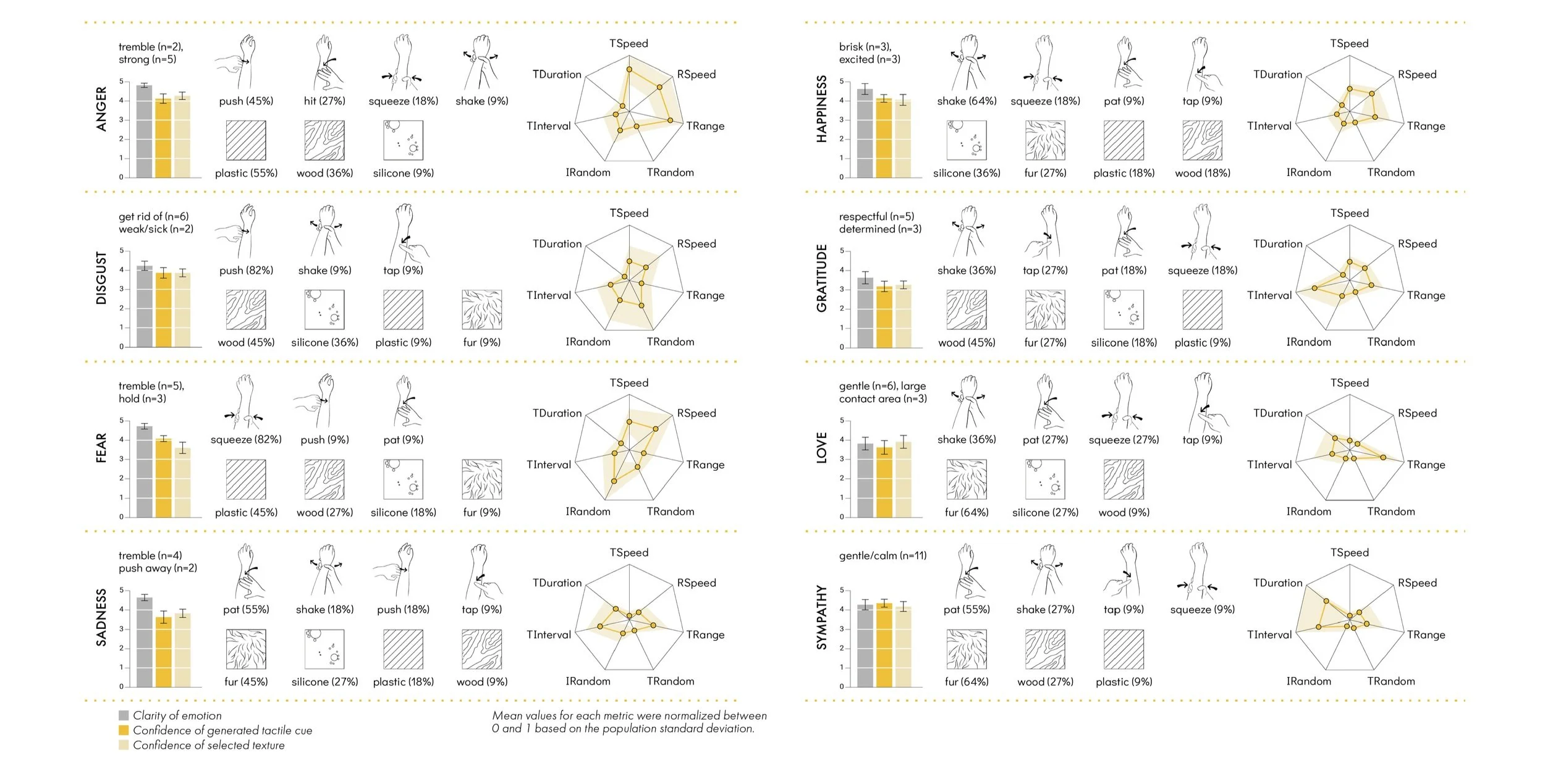
QUANTITATIVE RESULTS
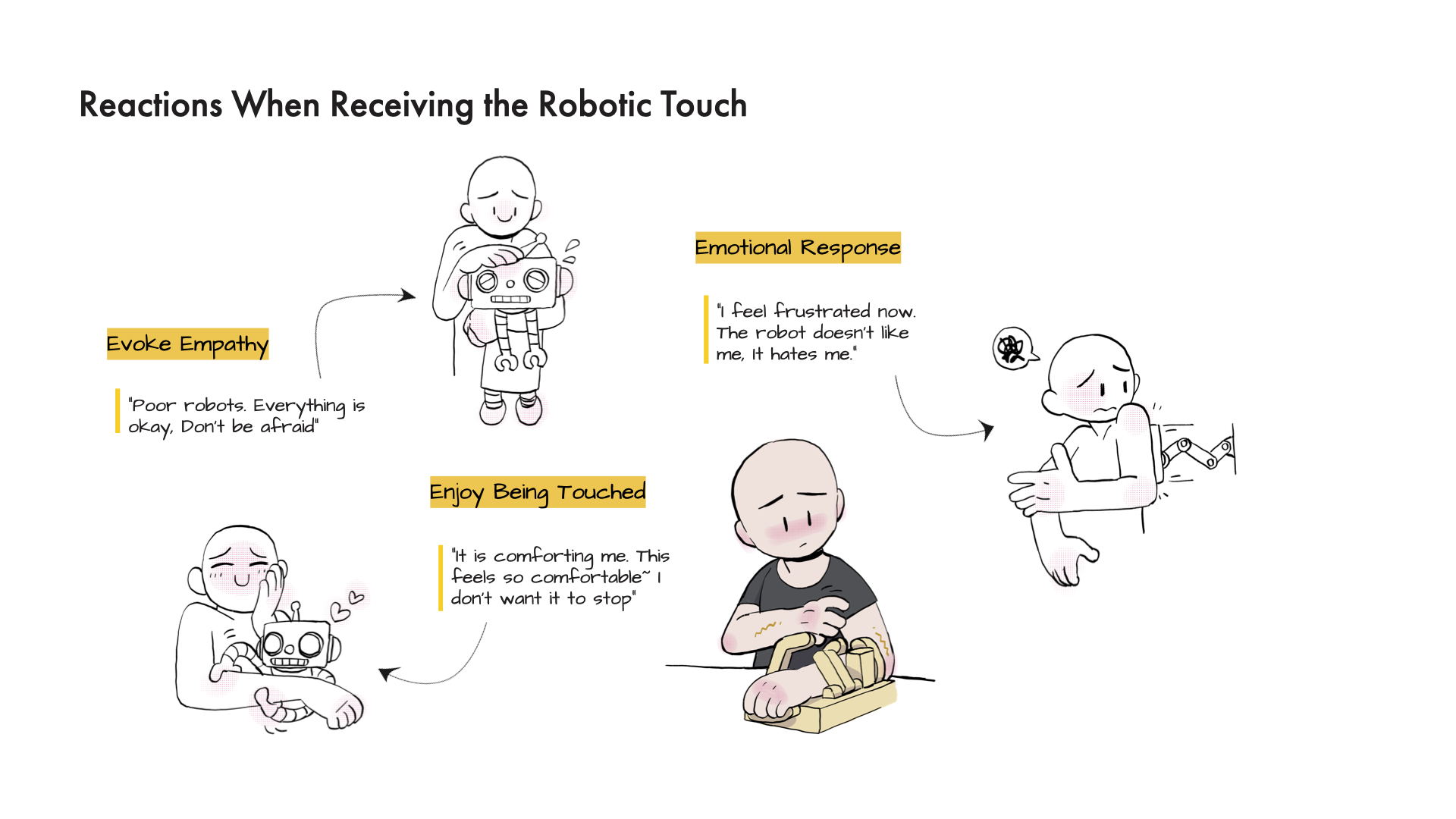
QUALITATIVE RESULTS

reflectionS
Patterns exist in the emotional robotic touch design
Uniqueness of touch experience and machine-like appearance of the robot help it keep the “otherness”
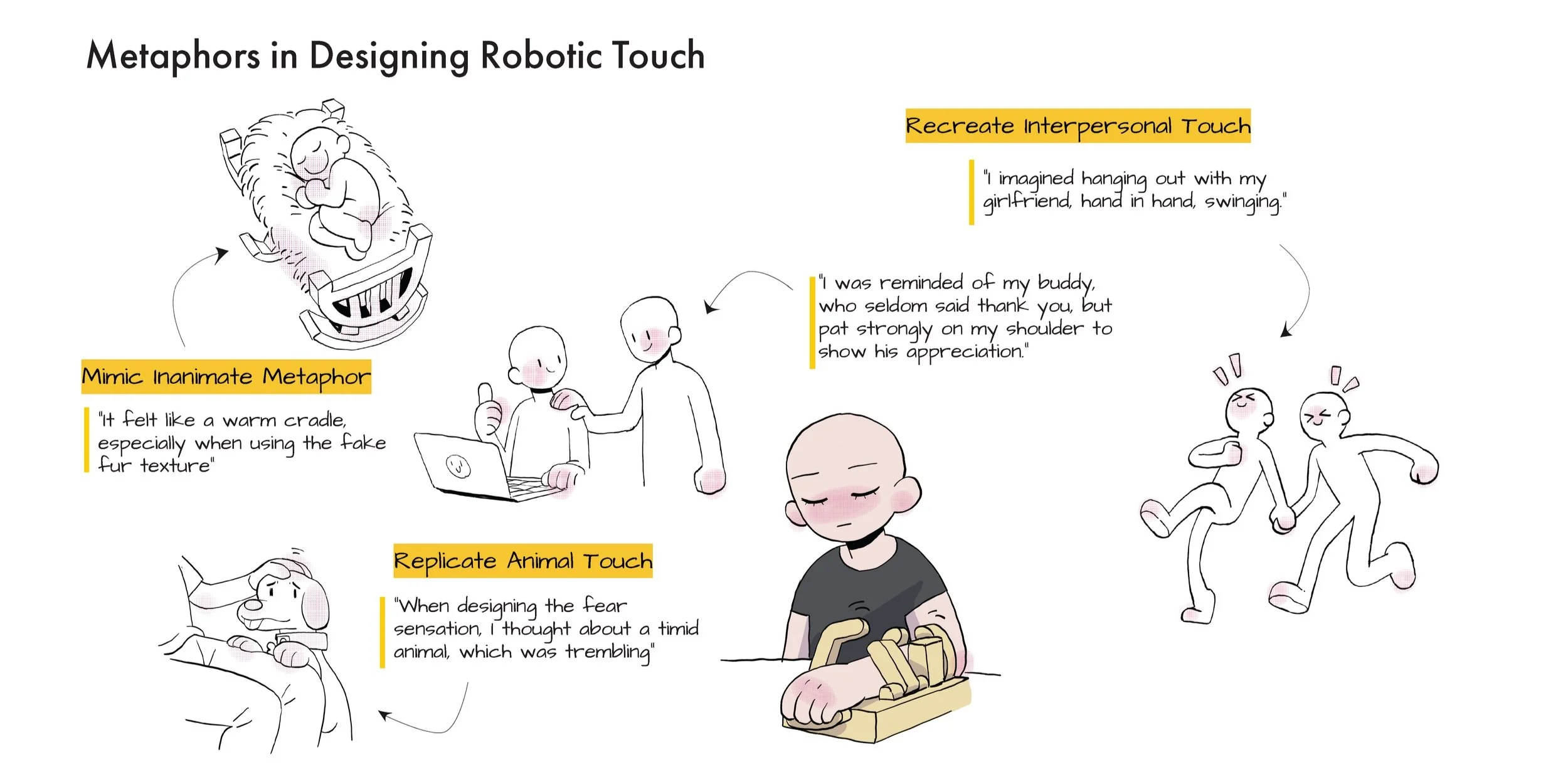
Metaphors evoked by robotic touch could exceed the dominant anthropomorphic and zoomorphic paradigms caused by its otherness
By utilizing the otherness of emotional robotic touch and its association with various metaphors, we have the possibility to tactilize and emotionalize information that is not usually communicated through touch.
PUBLICATION
Ran Zhou, Harpreet Sareen, Yufei Zhang, and Daniel Leithinger. 2022. EmotiTactor: Exploring How Designers Approach Emotional Robotic Touch. In Designing Interactive Systems Conference (DIS '22). Association for Computing Machinery, New York, NY, USA, 1330–1344. https://doi.org/10.1145/3532106.3533487 Best Pictorial Honorable Mention